
Wednesday, February 1, 2012
Pineapple
Tuesday, December 7, 2010
Mechatronics Robodeo!


For the second event of the Robodeo challenge, we needed to race around barrels with embedded IR LEDs in them. We used an array of IR transistors for our only sensors, and coded a state machine to drive around the barrels in a particular order and orientation. The wheels were molded from Smooth-On Oomoo 25 silicon rubber using a 3D printed mold I designed. The batman design on the wheels was made by my teammate, Michael Hurst.
Thursday, November 18, 2010
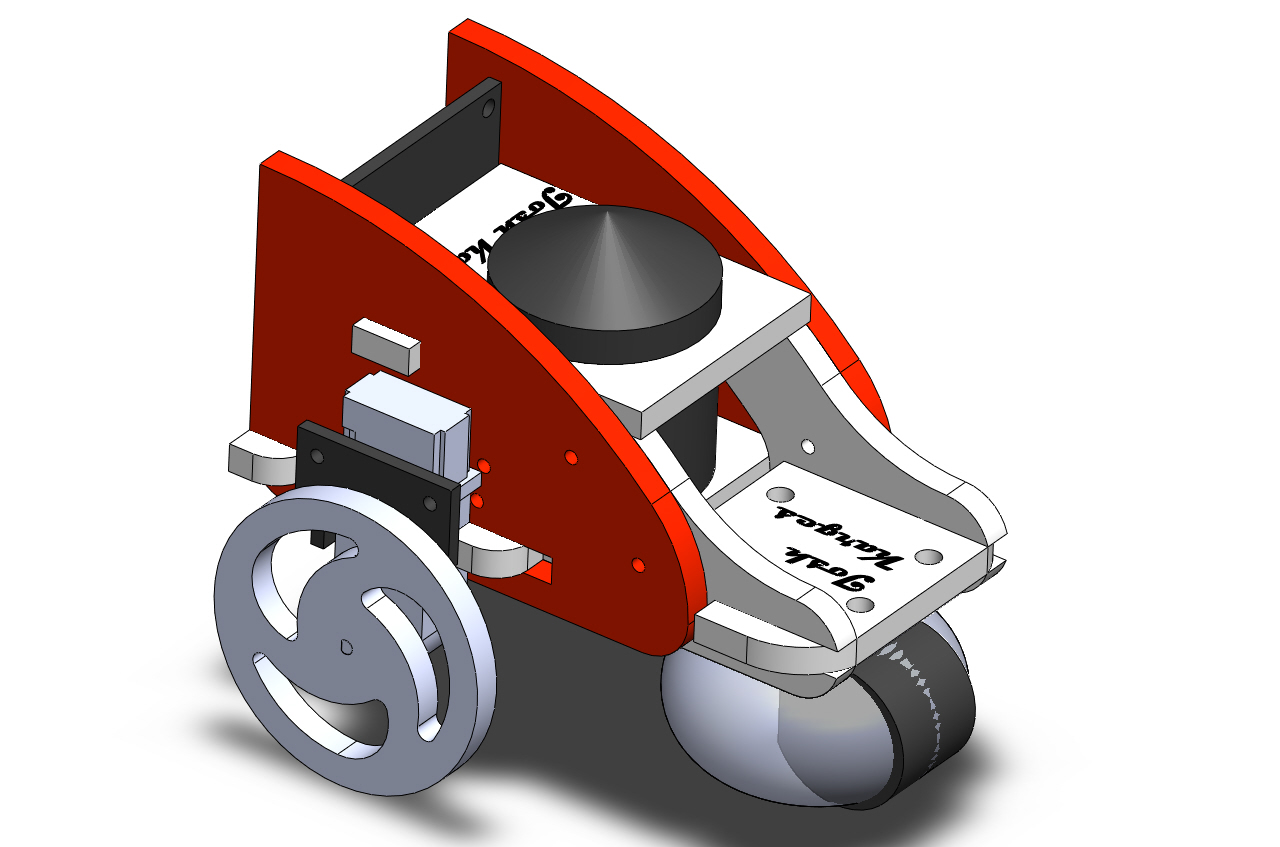
Mechatronics Mini-Segway
.JPG)
Thursday, October 14, 2010
Labyrinth RC Car

Thursday, August 26, 2010
SMA 3-DOF Mini Manipulator

The SMA project culminated in a 3-DOF manipulator entirely fabricated with an Objet 3D printer, and actuated with our patterned sheets of SMA. Everything, including the springs, can be printed in a single job, completely assembled. Of course it's more advisable to separate a few of the parts to minimize on support material needed, and to attach the SMA more conveniently.

Here's the entire assembly built for testing in the real world.
Wednesday, June 2, 2010
Hex Roller


A model of a single SMA flexible actuator.

The fully functional/locomotive hex roller.
Tuesday, June 1, 2010
SMA Activated Frictionless Joint

Three different designs for a frictionless joint driven by SMA linear actuators. The top and bottom white parts are connected with 3 strips of rubber that curve around opposite sides so the white parts can roll back and forth on each other with virtually no friction. When the actuator extends, it will pull the cable which is connected to the other end of the joint and will flex the joint in one way or another.


Here's two pictures of the finished product. 3D printing was done on an Objet Connex 500.
Subscribe to:
Comments (Atom)
